


My Expertise
I specialize in applying dynamic optimization to solve engineering problems. My interests range from chemical process control to programming, and from high altitude UAV systems to automated 3D photogrammetry planning. Python, Matlab and APMonitor/Gekko are my tools of choice.
My Education
I graduated in 2018 from Brigham Young University, with a Ph.D. from the BYU PRISM Lab. My most recent focus was applying advanced optimization and control methods to manage energy usage and plan trajectories for high altitude solar powered UAVs.

HALE UAV Trajectory Optimization
My most recent research involved using dynamic optimization to calculate improved flight trajectories for high altitude UAV systems. A major factor in HALE endurance is collecting enough solar energy to make it through long winter nights. My optimization applies nonlinear model predictive control (NMPC) to improve the way the aircraft orients itself relative to the sun throughout the day, increasing the energy collected and decreasing the area and cost of the solar panels required.
Arduino Process Control Lab
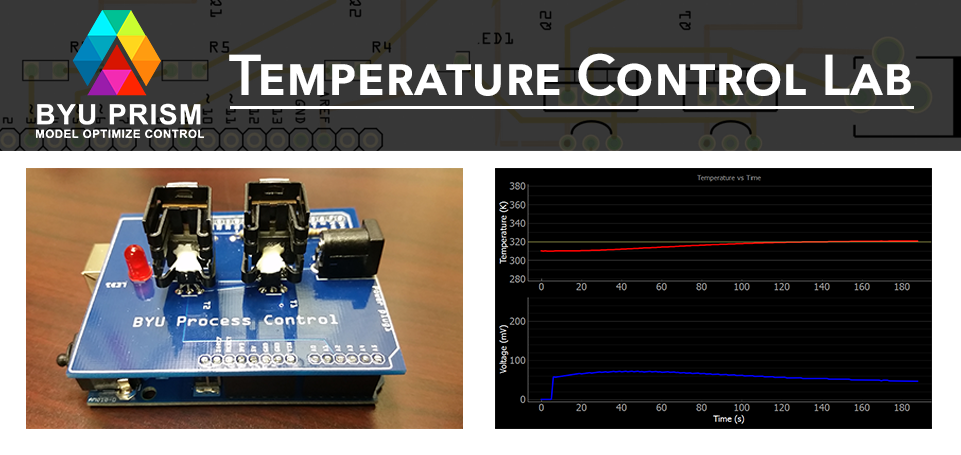
As part of my work in the BYU PRISM Lab I created the BYU Arduino Temperature Control Lab, which is now in use at universities across the world. The lab is designed as a modular, portable, and inexpensive solution for hands-on process control learning. Heat output is adjusted by modulating the voltage to a transistor. A thermistor measures the temperature. Energy from the transistor output is transferred by conduction and convection to the temperature sensor. The lab is integrated into a small PCB shield which can be mounted to any Arduino or Arduino compatible microcontroller. Experiments can then be programmatically controlled using Python over a USB connection.
Targeted 3D Modeling
In the summer of 2017, I was privileged to participate in the Air Force Research Laboratory Automatic Target Recognition Center (AFRL ATRC) Summer Program.
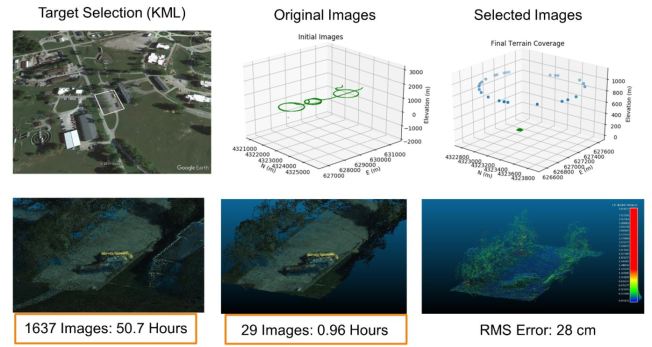
At the ATRCI developed a targeted view planning algorithm in Python used to select minimal image subsets from large aerial datasets to model specific vehicles and structures on the ground. The optimized selection improved 3D model processing times by a factor of 50.
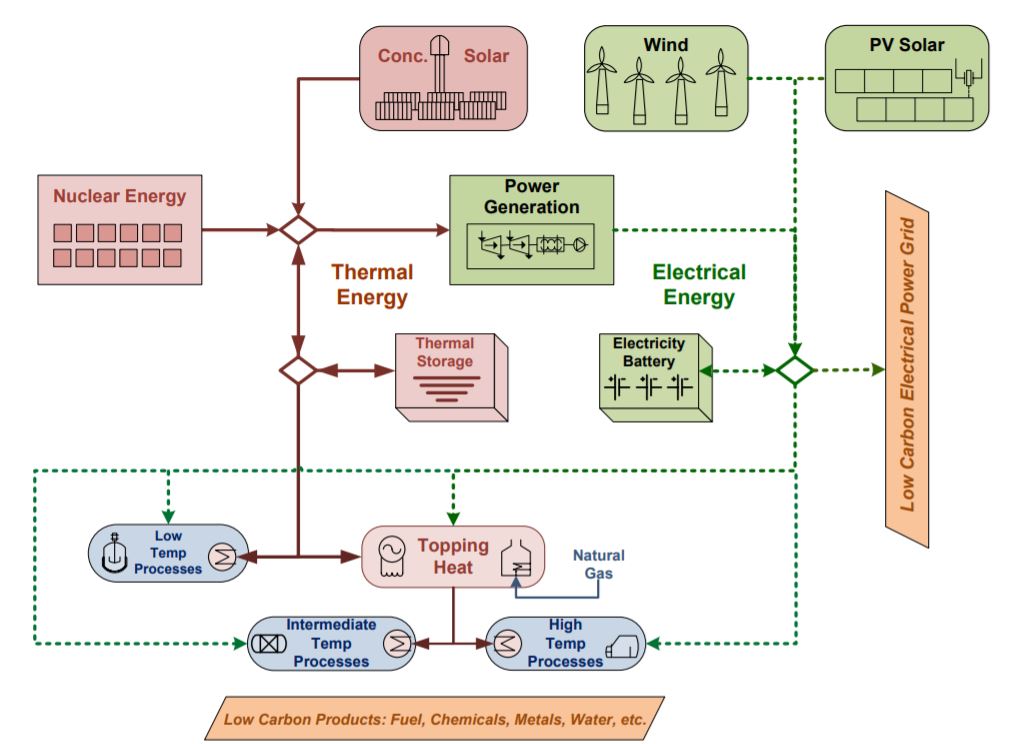
Energy Systems Modeling
As an intern at Idaho National Lab I modeled hybrid nuclear renewable energy systems in Aspen Plus.
Nuclear reactors are difficult to ramp up and down as demand changes. This means that when renewable energy sources such as solar and wind are introduced, excess energy can be available. Integrated energy systems help to solve this problem by diverting excess energy from the reactor to other uses, such as steam production in a chemical plant.
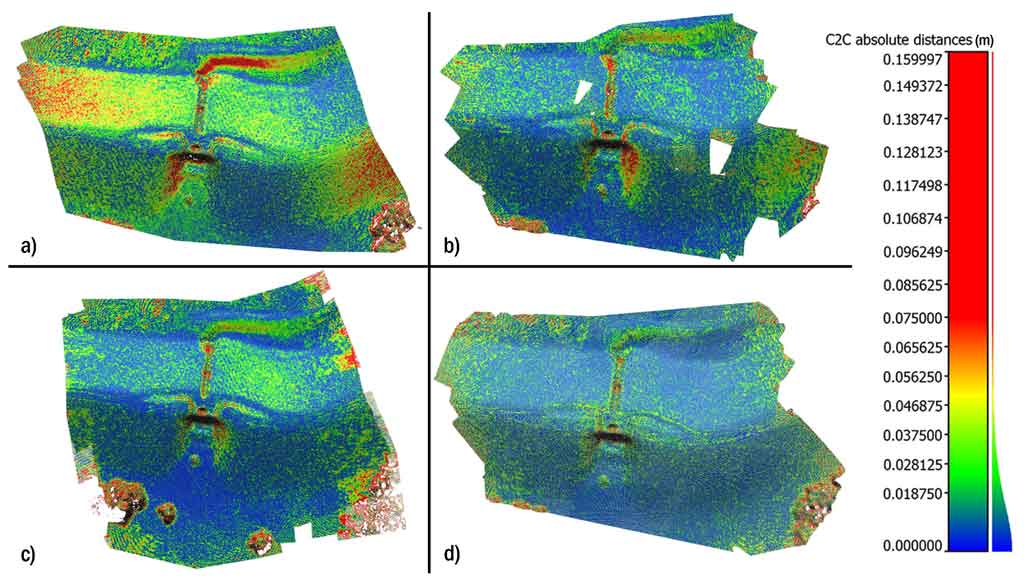
UAV Infrastructure Inspection
The quality of many UAV site models is currently highly dependent on manual pilot operations or grid-based automation solutions. When applied to 3D structures, these approaches can result in gaps in the total coverage or inconsistency in final model resolution.
As part of the NSF C-UAS Center, I used a genetic algorithm to effectively locate image positions that produce high quality models.
The optimized view plan yielded terrain models with up to 43% greater accuracy than a standard grid flight pattern, while maintaining comparable coverage and completeness
Optimization Intro Series
As a newcomer to the world of optimization, I often struggled with the concepts and ideas behind engineering optimization. I created the AlphaOpt YouTube channel as an avenue to explain basic optimization concepts with simple terms and interesting examples.
Many people have helped me along the way, and I hope to use the things I’ve learned to help others to more easily climb the learning curve themselves.
UAV Outcrop Modeling
In the summer of 2014 I stood at the edge of a cliff in the deserts of Eastern Utah with a geologist from a leading oil company. Together we looked over the vast chasm that divided us from the far wall of the canyon. Where I saw rocks and dust, she saw millions of years of history encoded into a thousand feet of stone, and in that history, coal, oil, gas, waiting below the ground to power our world. Our purpose in being there was to bring that history to print.
Using UAVs with high resolution cameras and computer vision techniques such as structure-from-motion (SfM), we created detailed models of the outcrops for later measurement and study by geologists, saving many days of field work.
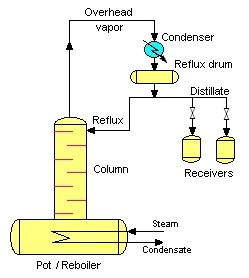
Batch Distillation Optimization
As a senior at BYU, I worked with a team of fellow students to optimize a methanol-ethanol batch distillation column in the department unit operations lab. We modeled the column, and applied dynamic optimization to control the ideal reflux ratio over time to maximize the amount and purity of the final product.
My team’s initial results were promising enough motivate a graduate student in the lab to continue the project, which was ultimately published in Computers and Chemical Engineering.
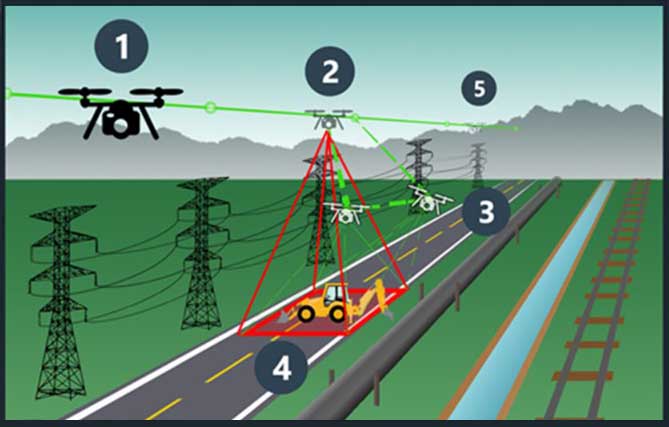
Long Linear Feature Monitoring
3D UAV modeling of large infrastructure such as canals and pipelines is time consuming and creates huge amounts of data. Detecting and modeling only the most important locations would save significant time and computing power.
In this C-UAS project, I showed in simulation that if automatic detection of anomalies is possible, real-time flight re-planning can reduce flight time by 55% and the required image data by 89%.
Bellagio Fountain Simulation
Selected as a MATLAB File Exchange Pick of the Week!
As part of my senior level Process Control class, I worked with a team to model and control a simulated version of the fountain show at the Bellagio Hotel.
The model and control system were built in Simulink and orchestrated 100 separate water jets in a beautiful display.
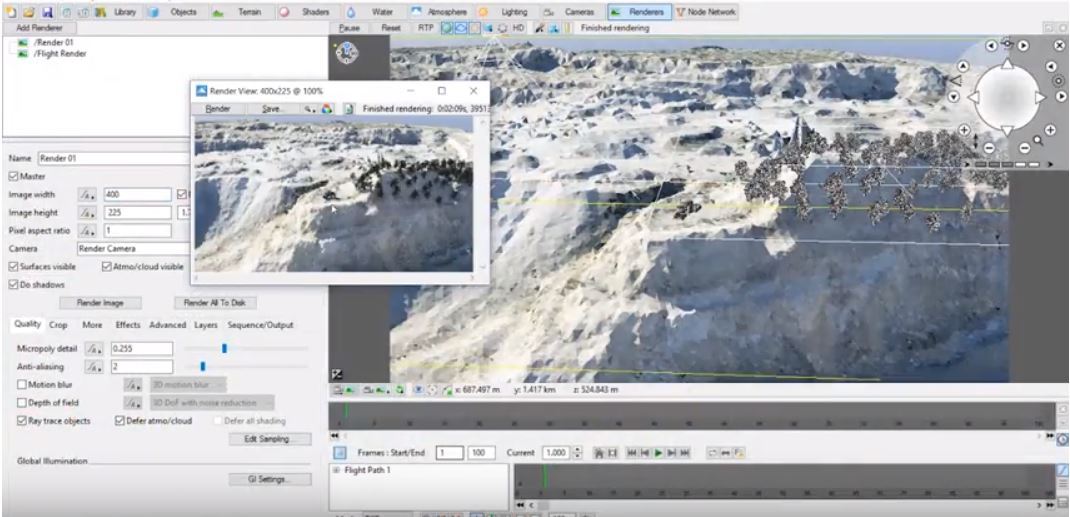
UAV Mapping Simulation
In the course of UAV photogrammetry research, it is often inconvenient to arrange for flights as often as needed.
To solve this problem, I re-purposed the animation software Terragen 4 to serve as a UAV mapping simulator. The simulator is capable of simulating detailed images from practically any camera, at just about any location. It has been extremely useful in our mission planning algorithm development.


